多用户多账户GitHub的ssh设置
我有两个github账号,在同一台电脑上,一个用于个人,一个用于团队。如何使用同时使用ssh对github进行数据推送呢?
场景:
用户名1:jobs
用户名2:musk
仓库1:git@github.com:jobs/apple.git
仓库2:git@github.com:musk/tesla.git
ssh密钥1:~/.ssh/jobs
ssh密钥2:~/.ssh/musk
我有两个github账号,在同一台电脑上,一个用于个人,一个用于团队。如何使用同时使用ssh对github进行数据推送呢?
场景:
用户名1:jobs
用户名2:musk
仓库1:git@github.com:jobs/apple.git
仓库2:git@github.com:musk/tesla.git
ssh密钥1:~/.ssh/jobs
ssh密钥2:~/.ssh/musk
输入feature('lcoal')查看当前环境编码格式
1 | ctype: 'zh_CN.GBK' |
进入matlab安装路径,打开lcdata.xml文件
D:\Program Files\MATLAB\R2014b\bin\lcdata.xml
将UTF-8与GBK编码对应
1 | <encoding name=”UTF-8”> |
修改为
1 | <encoding name="UTF-8"> |
然后修改
1 | <locale name="zh_CN" encoding="GBK" xpg_name="zh_CN.GBK"> |
为
1 | <locale name="zh_CN" encoding="UTF-8" xpg_name="zh_CN.UTF-8"> |
重启matlab
用于视频目标检测的NMS方法
视频目标检测困难的原因:
本文,我们提出单帧检测的一个简单拓展来帮助解决上述问题。
单帧检测完全忽略了时间维度,本文,我们在后处理阶段融合时序信息,以此优化每帧的检测结果。对于给定的时间序列上的ROI和类别得分,我们使用简单的重叠标准来连接邻近帧的BBox,使得序列的得分最大化。之后抑制附近的BBox,然后对BBox重打分。

贡献:
本文,我们介绍了检测候选的个体性作为一个补充用于评价行人检测。个体性从目标推荐和滑窗得到的原始检测候选中分配一个检测结果给每个物体。我们表明,传统的方法,如NMS,是次优的,因为其仅基于周围检测结果的得分来抑制。我们使用行列式点过程(determinantal point process)结合个体性优化选择最后的结果。该方法使用质量和相似性对每个检测结果建模。然后,检测结果中具有高检测得分和低相关性(通过矩阵行列式计算概率)的作为最后的结果。此矩阵由quality terms作为对角元素,其他位置是相似性元素。具体地,我们专注于行人检测问题,该问题由于其频繁的遮挡和不可预知的运动使其称为最具挑战的问题之一。实验结果显示本文提出的方法比NMS和不受约束的二次优化问题更好。
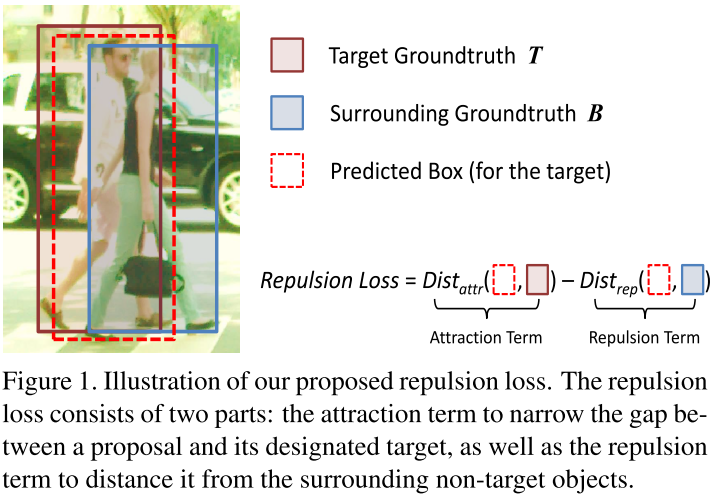
本文设计了一种loss函数用于加强bbox的回归精度,这个特性适用于目标密集且相互遮挡较多的场景,例如行人检测问题。该文的想法与另一篇文章《Individualness and Determinantal Point Processes for Pedestrian Detection》类似,后者通过行列式处理,前者设计loss函数。
在人群中检测个体行人仍然是一个具有挑战性的问题,由于在真实世界场景中行人通常聚集在一起并且相互遮挡。本文我们首次通过实验研究人群间的相互遮挡如何影响行人检测器的性能,对人群间遮挡的问题进行了分析。然后我们提出了一个针对人群场景设计的外接矩形回归损失函数,称为repulsion loss。该损失包含两个部分:与目标的attraction项和与周围物体的repulsion项。repulsion项避免矩形框偏移到旁边的物体上,因此对群体中的定位更加鲁棒。基于repulsion损失训练的检测器在遮挡场景下相对其它检测器有显著提升。